数字图像处理基础知识
图像的概念
图像是与之对应的景物的一个表示,一幅三维空间、动态的图像可以表示为,I是物体辐射能量,是空间变量,是时间变量。在实际应用中,图像可以借助不同的方式获得,得。目前普遍采用的一种方式是利用一定波谱段内的电磁能量来成像,可从可见光扩展到其他频段。在低频端,有红外线、微波等;在高频端,有紫外线、X射线、射线、宇宙射线。
考虑到某一波谱段内的电磁能量成像,图像可以表示为
一幅图像记录的是物体辐射能量的空间分布,一般表示成灰度图,这时为辐射度对应的灰度值。当对可见光成像时,灰度值对应客观景物被观察到
一般情况下只考虑平面、单色、静止图像,此时图像可表示为一个二维函数
数字图像表示
传统意义上的图像是连续的,即上式中的是连续的,连续表示的是空间中点的连续,连续表示的是物体辐射能量在空间中的分布连续,连续图像也称为模拟图像
为了便于利用计算机对图像进行进一步的加工和处理,需要把模拟图像在空间上、幅值上进行离散化,将其转换为对应的数字形式。离散化的图像称为数字图像。图像的离散化过程包括两种处理:取样和量化。一幅模拟图像的坐标及幅度都是连续的,为了把它转换为数字形式,必须对坐标和幅度都做离散化操作。数字化坐标值称为取样,它确定了图像的空间分辨率;数字化幅度值称为量化,它确定了图像的幅度分辨
坐标约定
取样和量化的结果是一个实数矩阵,我们主要使用两种方法来表示数字图像,假设一幅图像取样后,得到了一幅M行N列的图像,我们称这幅图像的大小为。坐标的值是离散量
以均匀取样为例,模拟图像的取样过程如下图,假设沿空间轴方向的取样间隔为等间距,沿轴方向的取样间隔为等间距,则均匀取样过程可看作将图像平面划分为规则、均匀的网格,每个网格的位置由表示,x的取值范围为[0, M-1],M为沿方向的取样点数;的取值范围为[0,N-1],N为沿方向的取样点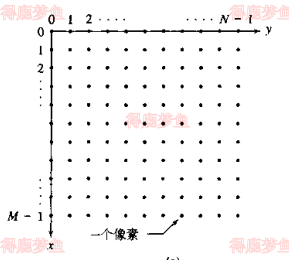
对于一维信号的取样过程来说,为了准确恢复出实际信号,必须满足香农取样定理。同样地,从取样图像中恢复原来的图像也需要满足二维取样定理
分别为方向上的最高空间
对于灰度图像,量化是对取样所得的离散样本点的灰度值进行离散化,将原图像的连续灰度用(k为整数)个等间距的灰度级进行表示。连续图像被取样与量化后可以用一个M×N矩阵来表示,即
此时,等式左边的被称为数字图像,矩阵中的每一个元素的坐标点代表图像的一个像素pixel
对于一幅数字图像,存储图像需要的比特
根据颜色的不同,可以将图像分为以下
图像类型
灰度图像
当一幅图像有个灰度级时,通常称该图像是k比特图像。例如,一幅图像有256个可能的灰度级,则称其为8比特图像。灰度图像中矩阵元素的取值范围通常为[0,255],因此其数据类型一般为8位无符号整数,这就是人们经常提到的256级灰度图像。0表示纯黑色,255表示纯白色,中间的数字从小到大表示由黑色到白色的过渡
二值图像
二值图像的灰度值只由0、1两个值构成,0代表黑色,1代表白色。由于每一个像素的取值仅有0、1两种可能,所以计算机中二值图像的数据类型通常为一个二进制位。二值图像通常用于文字、线条图的扫描识别(OCR)和掩模图像的存储。二值图像可以看作灰度图像的一个特例
彩色图像
RGB图像可以用来表示彩色图像。它分别用红色(R)、绿色(G)、蓝色(B)三基色的组合来表示每个像素的颜色,图像中每一个像素的颜色值(由RGB三基色表示)直接存放在图像矩阵中。由于每一个像素的颜色需要由R、G、B三个分量来表示,因此RGB像的图像矩阵与其他类型的图像矩阵不同,是一个三维矩阵。可用,M、N分别表示图像的行、列数,3个的二维矩阵分别表示各个像素的R、G、B三个颜色分量。每个颜色分量的数据类型一般为8位无符号整数
像素间的基本关系
一幅图像由基本单元像素组成,像素间存在着一定的联系,包括像素的邻域、邻接和连通,以及像素间的距离。一般地,当指定某个特定的像素时,用小写字母(如p)表示
像素的邻域
在一幅图像中,一个坐标为的像素的邻近像素组成了该像素的领域,根据邻近像素的不同定义,可以的到不同的领域,主要有4-邻域、 8-邻域以及对角邻域
4-邻域: 对于坐标为的像素p,它有水平和垂直的4个邻近像素,记作
8-邻域: 对于坐标为的像素p,包括水平、垂直和对角的8个邻近像素,记作
对角邻域:对于坐标为的像素p,包括对角的3个邻近像素,记作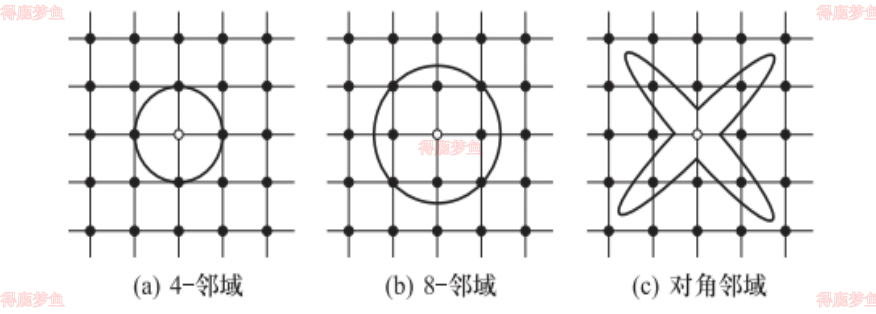
邻接与连通
对于任意的两个像素,若一个像素在另一个像素的邻域中,且它们的灰度值满足特定的相似准则(如灰度值集合),则称这两个像素是邻接的
令V表示关于邻接的灰度值集
4-邻接: 对于具有值V的像素p、q,如果q在集合中,则称这两个像素是4-邻接
8-邻接: 对于具有值V的像素p、q,如果q在集合中,则称这两个像素是8-邻接
m-邻接: 对于具有值V的像素p、q,如果p、q是4-邻接的,或者q在集合N_4pN_4q$的交集为空,则称这两个像素是m-邻接,
在介绍像素间的连通之前,先定义像素间的通路。从坐标为的像素p到坐标为x_0,y_0,x_1,y_1,x_2,y_2,\cdots,x_n,y_nx_i, y_i和是邻接的,其中,n为通路的长度。若,则该通路是闭合通路。根据不同的邻接类型可以得到不同的通路,如44-通路、8-通路和m-通路
像素间的距离
像素在空间上的接近程度用距离来度量。对于任意的像素p、q和r,坐标分别为若满足
则称函数D为距离或度量函数
在数字图像中,对上述距离函数D有几种不同定义,常见的有欧式距离、城区距离、棋盘距离等
欧式距离:
城区距离: = x - s + y - t
棋盘距离: = maxx - s, y - t