空间建模与空间决策支持
空间分析过程及其模型
空间分析的目的是解决某类与地理空间有关的问题,通常涉及多种空间分析操作的组合。好的空间分析过程设计将十分有利于问题的解决,一般步骤
- 明确分析的目的和评价准则
- 准备分析数据
- 进行空间分析操作
- 进行结果分析
- 解释评价结构
- 结果输出
空间分析建模
地图建模可以是一个空间分析流程的逆过程,即从分析的最终结果开始,反向一步步分析为得到最终结果,哪些数据是必须的,并确定每一步要输入的数据以及这些数据是如何派生而来
空间决策支持模型
区域规划、土地利用规划、设施位置选择、环境管理等都是有关空间行为的决策问题,这些问题的解决方案是由决策者或领域专家在专业领域知识和经验的启发下,在分析大量的空间和非空间信息的基础上得到的。空间决策问题大大超过了地理信息系统通常的空间分析功能的要求。
决策是一个决策者为达到某种目标或目标集合,根据一定的约束条件下在多种侯选方案里进行选择的复杂过程
构成部分
- 方案集合:决策问题的方案集合是指可以选择的行动方案集合
- 状态集合:任何一个决策问题都面临一定的外界环境,称之为状态。系统各种可能的状态,称为状态集合,记为Q
- 损益函数:这是决策分析中的一个重要概念。在决策问题中,如果采用策略,假定系统状态出现,系统收益。因此定义映射为决策问题的损益函数
- 目标函数(决策准则):记为F。损益函数只给出了系统的实际收益情况,但没给出收益的评价标准,即“抉择”时的优化准则。决策准则对于不同的决策者、问题、方法都是不同的,它最终决定了方案的形成
专家系统
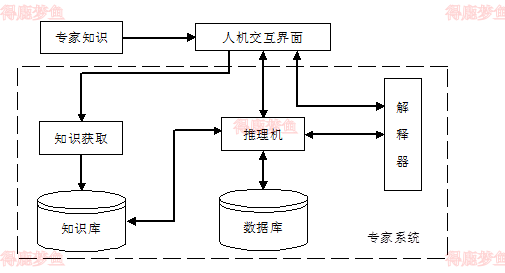
专家系统是人工智能在信息系统中的应用,它是一个智能计算机程序系统,其内部具有大量专家水平的某个领域知识与经验,能够利用人类专家的知识和解决问题的方法来解决该领域的问题。专家系统的主要功能取决于大量的知识。设计专家系统的关键是知识表达和知识运用。专家系统与一般计算机程序最本质的区别在于:专家系统所解决的问题一般没有算法解,并且往往是要在不完全、不精确或不确定的信息基础上做出结论。一般的专家系统包括数据库,知识库,推理机,解释器及知识获取五个部分组成
推理机
推理是指依据一定规则从已有的事实推出结论的过程。专家系统中的自动推理是知识推理,它是专家系统中问题求解的主要手段
知识推理方法可分为图搜索方法和逻辑论证方法两类
图搜索方法
基于图的知识表达,问题求解的知识推理过程,就是从图中相当于初始状态的出发节点到相当于目标状态的终止节点的路线搜索过程,即搜索从初始状态有效的转移到目标所经历的最优的或最经济的线路,相应的知识推理方法即图搜索方法
逻辑论证
当知识表示采用谓词(Predicate)逻辑或其他形式逻辑方法时,知识推理也可以采取逻辑论证方法。在这种情况下,求解一个问题相应于证明一个定理或几个定理,问题求解的知识推理过程,相应于用数理逻辑方法进行定理证明的过程。知识推理方法即逻辑论证方法
根据问题求解的推理过程是否运用启发性知识,知识推理方法可分为启发推理和非启发推理两类
根据问题求解的推理过程中结论是否精确,知识推理方法可分为精确推理和不精确推理两类
数据仓库与空间数据挖掘
数据仓库
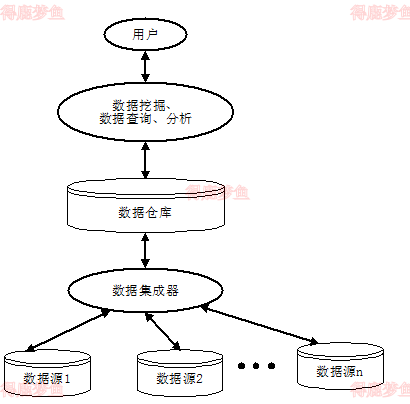
数据仓库是指面向主题的、集成的、稳定的、随着时间变化的数据集合,用以支持管理决策
数据仓库是一种把收集的数据转变成有意义的信息技术
数据挖掘
- 数据选取: 数据仓库中的数据并不都与挖掘的信息有关,第一步就是为了只提取“有用的”数据
- 数据转换:在确定要进行挖掘的数据之后,要对这些数据进行必要的变换,使得数据可以被进一步的操作使用
- 数据挖掘:在数据转换之后,就要进行数据挖掘,数据挖掘的具体技术很多,如分类、回归分析等
- 结果解释:挖掘的信息要参照用户的决策支持目的进行分析,并且要表现给决策者
空间数据挖掘
空间数据是与占有一定空间的对象有关的数据,空间数据库是通过空间数据类型和空间关系存储和管理空间数据。空间数据通常具有拓扑和距离信息,通过空间索引进行组织和查询
常用方法
- 统计分析方法
- 基于概括的方法
- 聚类方法
- 空间关联规则(Spatial Association Rule)方法
GIS空间分析与空间动态建模
空间动态模型是指现实世界中地球表面特定位置上的某些属性或状态因其驱动力随时间变化而发生改变的一种数学模拟
空间动态模型就是要计算各空间单元随其时间序列信息或驱动力的变化而产生新状态或属性值。各时刻的状态或属性可以用计算机以动画的形式进行显示,其实质仍然是图形代数和地图模型的自然延伸
GIS与空间动态模型的结合主要有三种方式:松散结合,交互界面和镶嵌结合
元胞自动机
元胞自动机(Cellular Automata,CA)是定义在一个具有离散、有限状态的元胞组成的元胞空间上的,按照一定局部规则,在离散的时间维上演化的动力学系统。元胞自动机的基本单元是元胞(Cell),每个元胞具有一个状态,这个状态只能取有限状态集中的一个,例如“生”或“死”,或者256种颜色中的一种等等;这些元胞规则地排列在被称为“元胞空间”的空间格网上;它们各自的状态随着时间变化,根据一个局部的规则来进行更新,即一个元胞在某时刻的状态取决于且只取决于该元胞周围邻域元胞的状态;元胞空间内的元胞依照此局部规则进行同步的状态更新,整个元胞空间则表现为在离散的时间维上变化
元胞自动机的最基本的组成包括元胞(Cell),元胞空间(Lattice),邻域(Neighbor),规则(Rule)。元胞自动机可以视为由一个元胞空间和定义在该空间的变换函数所组成
五个主要特征
- 它们由元胞的离散格局构成
- 它们在离散时间步序内演化;
- 每一元胞的状态均在同一有限集中取值;
- 每一元胞的状态依同一确定的法则演化;
- 元胞状态的取值法则仅依赖于其自身及其周围邻域元胞的状态值。
空间相互作用与位置——分配模型
对于生产单位和服务企业来说,由于需求和供给两方面总是存在着空间上分布的差异性,因此,机构设施地理位置(Geographic Location)的选择和确定对于它们的经济效益和自身的发展具有至关重要的影响作用。
机构设施位置评价和优化,是通过对于一个设施或者一个设施网络的供给和需求两者之间的相互作用关系进行分析来实现其空间位置分布模式的优化。机构设施区位评价是对于现有服务设施的空间位置分布模式的评价,机构设施区位优化是对于其最佳位置的搜寻
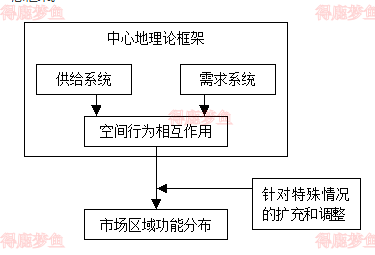
中心地理论的古典模型是对包含单一目标的、且内部需求全部针对这个目标中心的具有均质性的市场功能区域进行空间分析和模拟,而中心地理论的现代模型则要针对现实世界中那些具有不确定性的、涉及多目标消费行为和复杂供给行为的市场功能区域进行空间分析和模拟
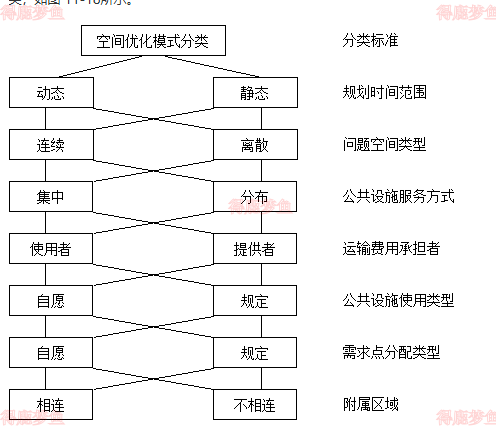
空间优化模式用于解决位置——分配问题
优化模式基本结构由一系列边界条件和一个(或几个,但少见)目标函数组成。在这些边界条件下,求目标函数的极大值或极小值。边界条件代表了规划目标所必须满足的划条件,它们代表了对于目标规划区域功能的基本评价;而优化目标函数(即求目标函数的极值)则代表了一个最大限度可能达到的规划目标。因此,在边界条件中体现出来的关目标函数的规划条件具有首要意义,与优化目标函数相应的规划目标的重要性则稍差一些引入目标函数的极大、极小化意义,在于得到一个定位一配置问题的明确答案(指在一定边界条件下,目标函数有数个可行答案的情况下)