3S集成技术
遥感简介
遥感Remote Sensing,通常是指通过某种传感器装置,在不与研究对象直接接触的情况下,获得其特征信息,并对这些信息进行提取、加工、表达和应用的一门科学技术
遥感技术的基础,是通过观测电磁波,从而判读和分析地表的目标以及现象,其中利用了地物的电磁波特性,即“一切物体,由于其种类及环境条件不同,因而具有反射或辐射不同波长电磁波的特性”
在遥感技术中,接收从目标反射或辐射电磁波的装置叫做遥感器(Remote Sensor),而搭载这些遥感器的移动体叫做遥感平台(Platform),包括飞机、人造卫星等,甚至地面观测车也属于遥感平台。通常称用机载平台的为航空遥感(Aerial Remote Sensing),而用星载平台的称为航天遥感
按照遥感器的工作原理,可以将遥感分为被动式遥感(Passive Remote Sensing)和主动式遥感(Active Remote Sensing)两种,而每种方式又分为扫描方式和非扫描方式
遥感数据的处理——通常是图像形式的遥感数据的处理,主要包括纠正(包括辐射纠正和几何纠正)、增强、变换、滤波、分类等功能,其目的主要是为了提取各种专题信息,如土地建设情况、植被覆盖率、农作物产量和水深等等,遥感图像处理可以采取光学处理和数字处理两种方式,数字图像处理由于其可重复性好、便于与GIS结合等特点
图像纠正
图像纠正是消除图像畸变的过程,包括辐射纠正和几何纠正。辐射畸变通常由于太阳位置,大气的吸收、散射引起;而几何畸变(图12-5)的原因则包括遥感平台的速度、姿态变化,传感器,地形起伏等,几何纠正包括粗纠正和精纠正两种,前者根据有关参数进行纠正;而后者通过采集地面控制点(GCPs, Ground Control Points),建立纠正多项式,进行纠正
增强
增强的目的是为了改善图像的视觉效果,并没有增加信息量,包括亮度、对比度变化以及直方图变换等
滤波
滤波分为低通滤波、高通滤波和带通滤波等,低通滤波可以去除图像中的噪声,而高通滤波则用于提取一些线性信息
变换
包括主成分分析Principal Component Analyst,色度变换以及傅立叶变换等,还包括一些针对遥感图像的特定变换
分类
利用遥感图像的主要目的是为了提取各种信息,一些特定的变换可以用于提取信息,但是最主要的手段则是通过遥感图像分类Classification。计算机分类的基本原理是计算图像上每个象元的灰度特征,根据不同的准则,进行分类。遥感图像分类有两类方法,即监督分类Supervised Classification和非监督分类Unsupervised Classification
全球定位系统简介
全球定位系统GPS, Global Positioning System是利用人造地球卫星进行点位测量导航技术的一种
GPS系统包括三大部分:空间部分——GPS卫星星座;地面控制部分——地面监控系统;用户设备部分——GPS信号接收机
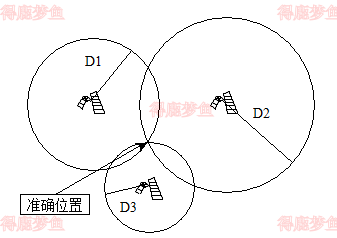
GPS定位基本原理是利用测距交会确定点位。如下图所示,一颗卫星信号传播到接收机的时间只能决定该卫星到接收机的距离,但并不能确定接收机相对于卫星的方向,在三维空间中,GPS接收机的可能位置构成一个球面;当测到两颗卫星的距离时,接收机的可能位置被确定于两个球面相交构成的圆上;当得到第三颗卫星的距离后,球面与圆相交得到两个可能的点;第四颗卫星用于确定接收机的准确位置。因此,如果接收机能够得到四颗GPS卫星的信号,就可以进行定位;当接收到信号的卫星数目多于四个时,可以优选四颗卫星计算位置
3S集成综述
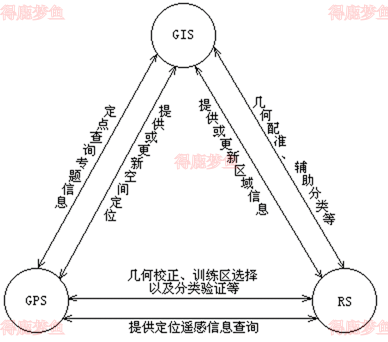
3S技术为科学研究、政府管理、社会生产提供了新一代的观测手段、描述语言和思维工具。3S的结合应用,取长补短,是一个自然的发展趋势,三者之间的相互作用形成了“一个大脑,两只眼睛”的框架
即RS和GPS向GIS提供或更新区域信息以及空间定位,GIS进行相应的空间分析,以从RS和GPS提供的浩如烟海的数据中提取有用信息,并进行综合集成,使之成为决策的科学依据