概论
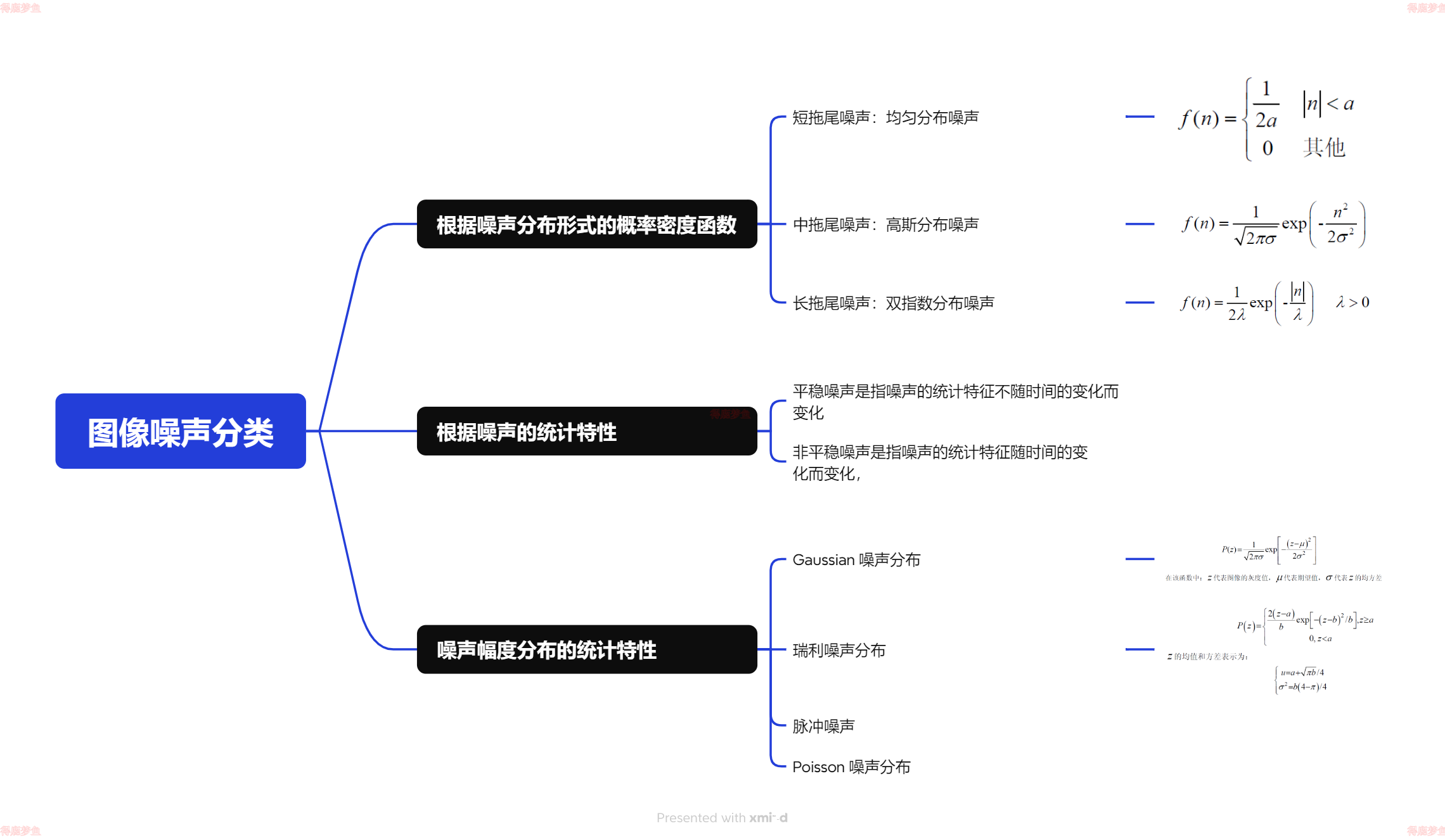
分类
效果评价
主观评价
主观评价一般是通过人的肉眼对去噪后的图像和原始图像进行对比观察,通过观察图像噪声去除的效果以及图像细节保留的情况来判断去噪方法的优劣
客观评价
由于着眼点的不同会衍生出很多不同的评价图像质量的客观方法。而在这些客观评价图像质量的方法中,逼真度测量是最为常见的一种客观评价方法。彩色图像由于其本身非常复杂的特性,很难定量的给出其具体的图像逼真度参数。所以这种方法目前较多的应用在定量表示黑白图像的逼真度。
图像逼真度测量方法的原理既是计算出去噪后的图像与原始图像的统计误差。很显然,该统计值越小则说明图像间的逼真度越高,去噪后的图像越接近于原始图像,我们就可以认为图像的质量高,该去噪方法较为理想。
图像逼真度计测参数有很多,我们常用的有:均方误差MeanSquareError, MSE、平均绝对误差Mean Absolute Error,MAE、归一化均方误差Normalized Mean Square Error,NMSE、信噪比Signal to Noise Ratio,SNR和峰值信噪比 Peak Signal to NoiseRatio,PSNR等。
先设定表示原始图像,表示去噪后的图像,表示像素点的坐标,图片的尺寸大小为
均方误差
归一均方误差
平均绝对误差
$$
归一化平均绝对误差
峰值信噪比
图像噪声
从本质上讲,图像噪声既是图像在摄取时或是传输时所受到的随机干扰信号。我们说,这些随机信号噪是不可预测的,通常概率统计方法对这些信号进行分析。噪声对图像处理十分重要,它影响图像处理的输入、采集、处理、输出的各个环节。
概率分布函数和概率密度函数可以非常准确地描述图像噪声,但在很多情况下,使用这种描述方法会很复杂,甚至无法得出具体的公式,而且在实际应用中往往也不需要做出这样精确的描述。所以我们在对图像噪声进行描述时一般会采用统计学中的均值和方差的概念, 设图像是一个二维信号,可以用下面的公式表示图像噪声的均值和方差
均值
方差
去噪方法
目前基本上可以把图像的去噪处理方法基本上可分为两大类:空间域法和频域法,
空间域滤波的方法是直接在原图像上借助模板进行邻域操作进行数据运算,从而实现对像素的灰度值进行处理。根据操作特点可以把空间域滤波分为线性滤波和非线性滤波两类其中均值滤波是较常见的线性滤波方法,中值滤波则是非线性滤波方法中常见的一种
域滤波法是在图像的频域上进行处理,它先要计算出待去噪图像的傅里叶变换,将得到的结果乘以一个传递函数,最后进行傅里叶逆变换即可得到去噪后的图像。常见的频域滤波方法是维纳滤波
均值滤波
主要思想为邻域平均法,即用几个像素灰度的平均值来代替每个像素的灰度,来实现对图像噪声的消除
基本思想是取某个像素,用其邻域内的所有像素的灰度平均值来代替该像素点最初的灰度值,具体操作是选取一个窗口使其在图像上滑动,该窗口正中心位置点即为我们所选取的操作点,将该操作点周围像素点的灰度值求和取平均值,并把该灰度值赋予选定的操作点,总的来说,就是用多个像素的灰度平均值来代替一个像素的灰度值。假设是我们选定的一副的图像,,S为该像素的点的领域空间,S中包含m个像素点,是利用均值滤波算法去噪后的图像则
中值滤波
自适应非线性滤波器
工作原理是:先将预处理的图像信号通过参数可调数字滤波器,产生一个输出信号,然后将输出信号与参考信号作差,得到相应的误差信号。之后选择合适的自适应算法借助误差信号多次调整滤波器的参数,直至误差信号的均方差最小。